# GIS Integration
Geographic Information Systems (GIS) have traditionally relied on low-accuracy GNSS for creating map layers. Nowadays, users can opt for centimeter-level accuracy with RTK GPS, which has become more affordable and is in demand for precise projects. Consequently, RoboDot is a viable option for cost-effective and accurate GIS operations.
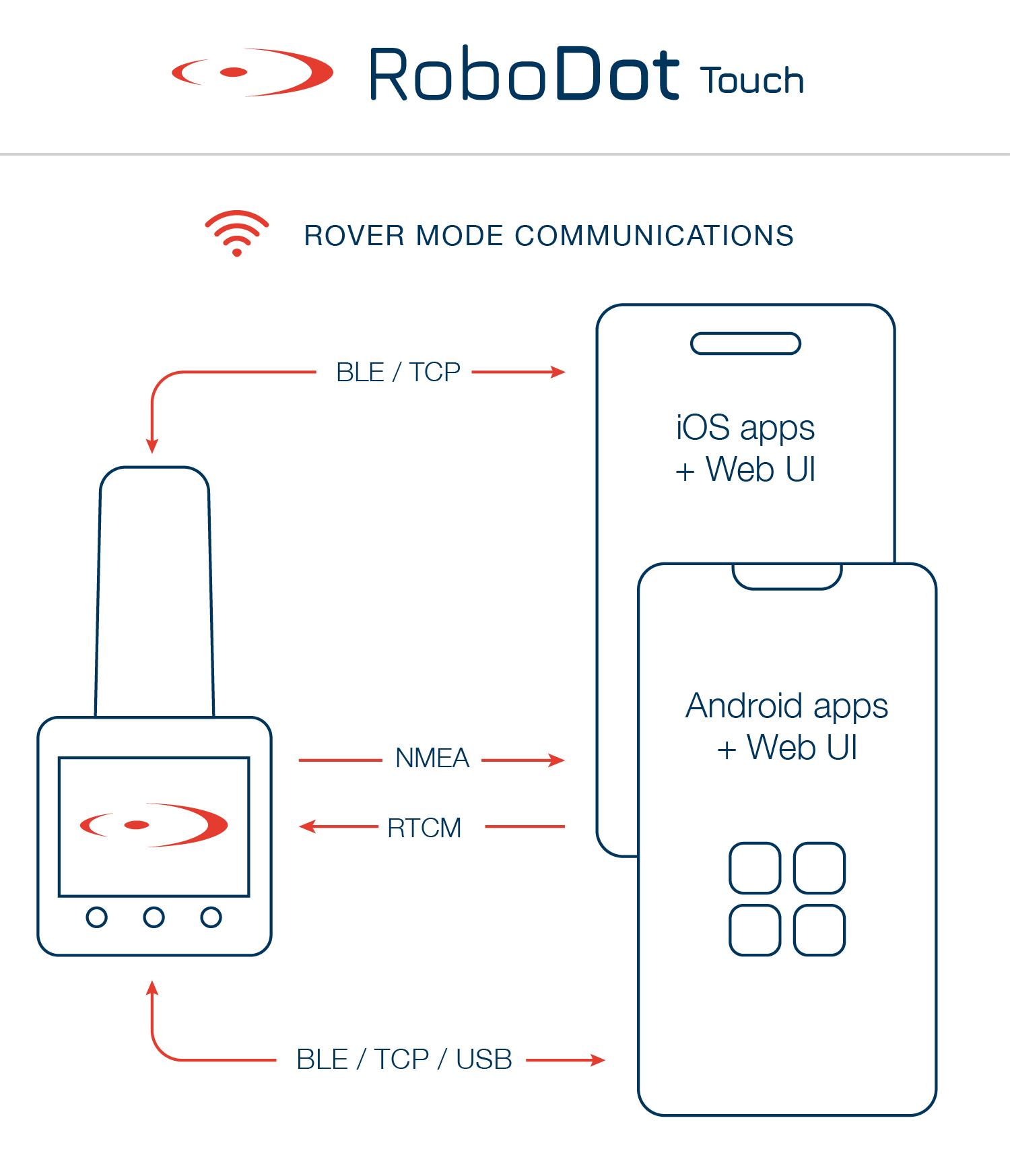
NMEA sentences are transmitted from RoboDot to GIS applications through TCP, Bluetooth (LE), and Serial connections.
**RoboDot should be set up as a Rover when used with GIS and Surveying applications**
How RoboDot Connects to GIS apps
## Compatible Applications
RoboDot expands its functionality by interfacing with a multitude of device applications to replace their internal, often inaccurate GPS systems. Through robust connectivity options like Bluetooth Low Energy (BLE), Serial, and TCP, RoboDot offers versatile integration possibilities. For instance, popular GIS and surveying apps can effortlessly connect via these protocols to leverage RoboDot's centimeter-level accuracy, enhancing the overall mapping precision. Many applications share similar integration interfaces, ensuring that RoboDot can seamlessly maximize operational potential across various devices, whether through a WiFi network, BLE, or Serial connections.
{% content-ref url="/pages/j2LzjvHIMREQRB3RVvuX" %}
[SW Maps (iOS)](/robodot-touch-3.1.16/robodot-touch-applications/gis-integration/sw-maps-ios.md)
{% endcontent-ref %}
{% content-ref url="/pages/WHTrZn5gQxT2vLk5eqzY" %}
[SW Maps (Android)](/robodot-touch-3.1.16/robodot-touch-applications/gis-integration/sw-maps-android.md)
{% endcontent-ref %}
{% content-ref url="/pages/sxsO1vDSRlNffLiUDeCX" %}
[GNSS Master (Android)](/robodot-touch-3.1.16/robodot-touch-applications/gis-integration/gnss-master-android.md)
{% endcontent-ref %}
{% content-ref url="/pages/7VcUezvTxAY7dOfWG9Vt" %}
[QGIS (PC)](/robodot-touch-3.1.16/robodot-touch-applications/gis-integration/qgis-pc.md)
{% endcontent-ref %}
{% content-ref url="/pages/4ZUmEIU33VBLq3xAVVYB" %}
[Survey123](/robodot-touch-3.1.16/robodot-touch-applications/gis-integration/survey123.md)
{% endcontent-ref %}
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://docs.robota.us/robodot-touch-3.1.16/robodot-touch-applications/gis-integration.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.